
드론 비행은 여러 제어 요소의 정확한 조합으로 이루어집니다.
오늘은 드론 조종에 필수적인 핵심 용어와 원리에 대해 알아보겠습니다.
비행 제어의 기본 용어

스로틀(Throttle)
스로틀은 드론의 상승과 하강을 담당하는 가장 기본적인 제어 요소입니다.
조종기의 왼쪽 스틱을 위아래로 움직여 모터의 회전 속도를 조절함으로써 드론의 높이를 제어합니다.
스로틀을 올리면 모든 모터가 더 빠르게 회전하여 드론이 상승하고, 내리면 모터 회전이 느려져 드론이 하강합니다.
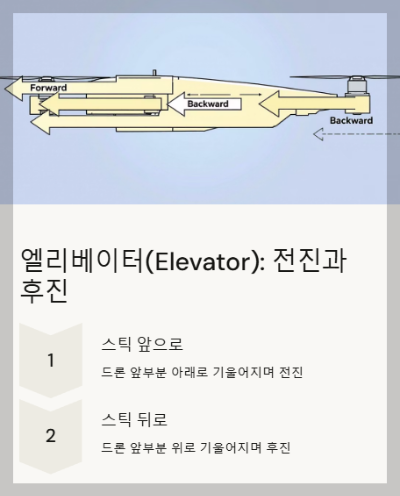
엘리베이터(Elevator) - 피치(Pitch) 제어
엘리베이터는 드론의 앞뒤 기울기(피치)를 제어합니다.
조종기의 오른쪽 스틱을 앞뒤로 조작하면 드론의 전진과 후진 움직임이 결정됩니다.
스틱을 앞으로 밀면: 드론의 앞부분이 아래로 기울어지며 전진
스틱을 뒤로 당기면: 드론의 앞부분이 위로 기울어지며 후진

에일러론(Aileron) - 롤(Roll) 제어
에일러론은 드론의 좌우 기울기(롤)를 담당합니다.
조종기의 오른쪽 스틱을 좌우로 움직이면 드론이 해당 방향으로 기울어집니다.
스틱을 왼쪽으로 움직이면: 드론이 왼쪽으로 기울어지며 좌측 이동
스틱을 오른쪽으로 움직이면: 드론이 오른쪽으로 기울어지며 우측 이동

러더(Rudder) - 요(Yaw) 제어
러더는 드론의 수평 회전(요)을 제어합니다.
조종기의 왼쪽 스틱을 좌우로 조작하면 드론이 제자리에서 좌우로 회전합니다.
스틱을 왼쪽으로 움직이면: 드론이 왼쪽(반시계 방향)으로 회전
스틱을 오른쪽으로 움직이면: 드론이 오른쪽(시계 방향)으로 회전
CW/CCW 프로펠러 회전과 드론의 방향 제어

쿼드콥터 드론은 보통 네 개의 프로펠러를 사용하며, 대각선으로 위치한 프로펠러들은 같은 방향으로 회전합니다:
두 개는 시계 방향(CW)으로 회전
다른 두 개는 반시계 방향(CCW)으로 회전
이 배열은 드론의 안정성을 유지하는 데 중요한 역할을 합니다.
각 프로펠러가 발생시키는 토크(회전력)는 서로 상쇄되어 드론이 의도치 않게 회전하는 것을 방지합니다.
CW/CCW 프로펠러와 드론의 움직임
요(Yaw) 제어와 CW/CCW 프로펠러의 관계:
우측 회전(시계 방향):
CCW 프로펠러의 속도를 증가시키고
CW 프로펠러의 속도를 감소시킵니다
이때 CCW 프로펠러가 더 빠르게 회전하면서 발생하는 반작용 토크로 인해 드론은 시계 방향으로 회전합니다
좌측 회전(반시계 방향):
CW 프로펠러의 속도를 증가시키고
CCW 프로펠러의 속도를 감소시킵니다
CW 프로펠러의 빠른 회전으로 발생하는 반작용 토크가 드론을 반시계 방향으로 회전시킵니다
전진/후진 시 CW/CCW 프로펠러의 작동:
전진 시: 뒤쪽에 위치한 프로펠러들(CW와 CCW 모두)의 속도가 증가하여 드론의 뒷부분이 올라가고 앞부분이 기울어집니다
후진 시: 앞쪽에 위치한 프로펠러들의 속도가 증가하여 드론의 앞부분이 올라가고 뒷부분이 기울어집니다
좌우 이동 시 CW/CCW 프로펠러의 작동:
우측 이동 시: 왼쪽에 위치한 프로펠러들(CW와 CCW 모두)의 속도가 증가하여 드론이 오른쪽으로 기울어집니다
좌측 이동 시: 오른쪽에 위치한 프로펠러들의 속도가 증가하여 드론이 왼쪽으로 기울어집니다
정밀한 드론 제어를 위한 팁
드론을 능숙하게 조종하기 위해서는 이러한 제어 요소들을 조화롭게 사용해야 합니다:
부드러운 조작: 조종 스틱을 갑작스럽게 움직이지 말고 부드럽게 조작하여 드론의 안정성을 유지합니다.
고도 유지: 방향 전환이나 이동 시 스로틀을 적절히 조절하여 일정한 고도를 유지합니다.
시각적 기준점: 드론의 전면부를 인식하고 그에 맞게 조종해야 올바른 방향으로 움직일 수 있습니다.
단계적 학습: 호버링부터 시작하여 천천히 더 복잡한 움직임으로 발전시키는 것이 좋습니다.
핵심 키워드 정리
토크(Torque): 드론 프로펠러가 회전하면서 발생시키는 회전력으로, CW와 CCW 프로펠러의 토크 균형이 드론의 안정성을 유지합니다.
요잉 모멘트(Yawing Moment): 프로펠러 회전 속도 차이로 인해 발생하는 회전 모멘트로, 드론의 좌우 회전을 가능하게 합니다.
쓰러스트(Thrust): 프로펠러가 생성하는 상승력으로, 스로틀 조절을 통해 제어됩니다.
짐벌 락(Gimbal Lock): 드론이 특정 자세에서 한 축의 제어가 불가능해지는 현상으로, 적절한 자세 제어가 중요합니다.
PID 제어(PID Control): 드론의 안정적인 비행을 위한 제어 알고리즘으로, 프로펠러 속도를 정밀하게 조절하여 안정적인 비행을 가능하게 합니다.
드론 비행 제어 요소들을 이해하고 CW/CCW 프로펠러의 작동 원리를 파악한다면, 더욱 정밀하고 안정적인 드론 조종 기술을 습득할 수 있을 것입니다.
'드론' 카테고리의 다른 글
| 🛫 드론 비행의 4가지 핵심 힘 (0) | 2025.05.05 |
|---|---|
| 드론 에어포일의 모든 것 (1) | 2025.05.04 |
| 📌 제목: 국내드론시장, 어디까지 성장했나? (0) | 2025.05.04 |
| 🚨 드론 몰카, 우리의 일상을 위협하다 불법 촬영이 하늘에서도? (0) | 2025.05.03 |
| 드론기술혁신 (0) | 2025.05.03 |



